| |
|
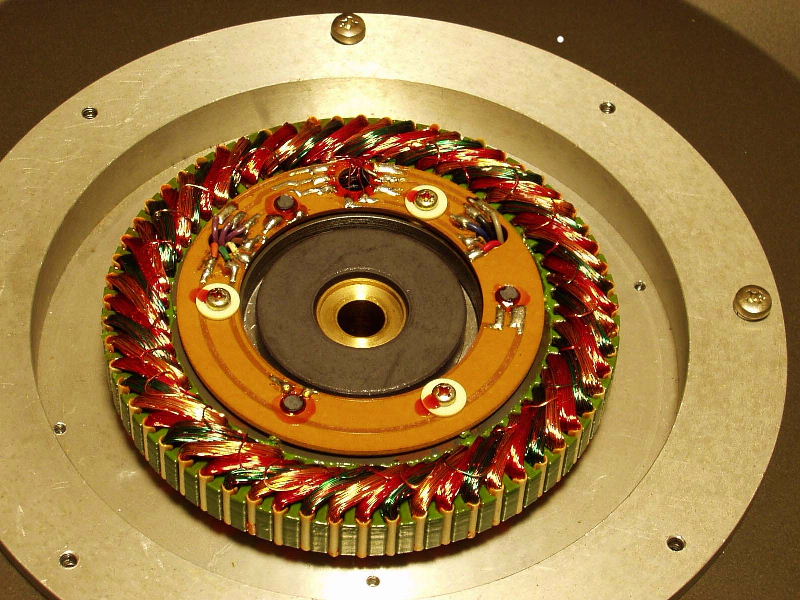
motor |
Stator(固定子) |
Rotor(回転子) |
|
Platter |
|
|
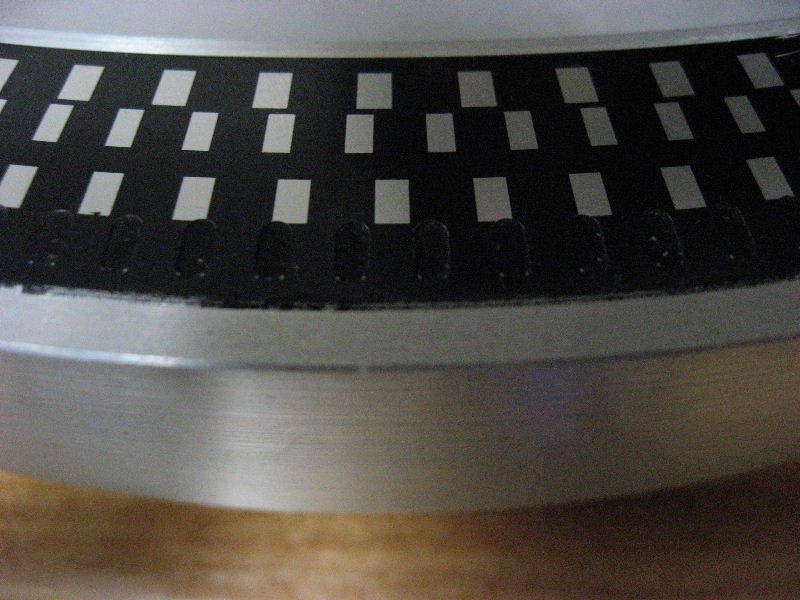
strobopattern |
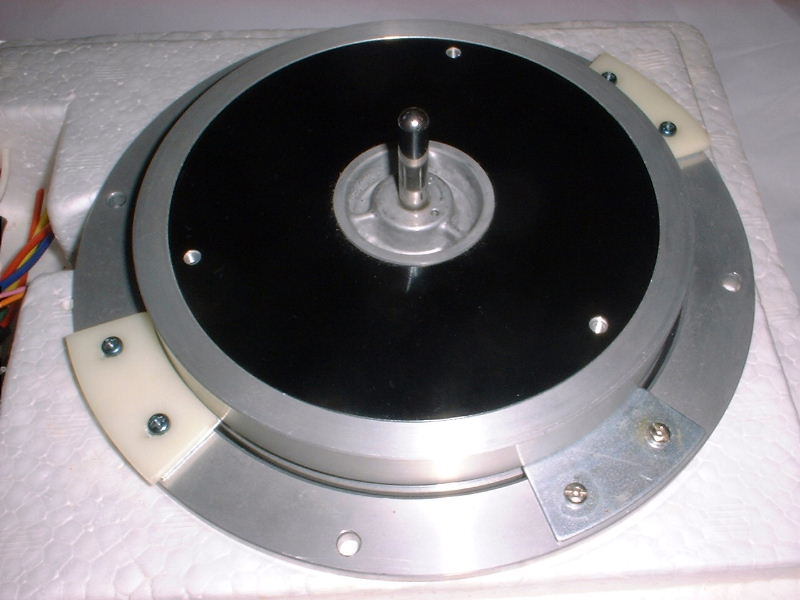
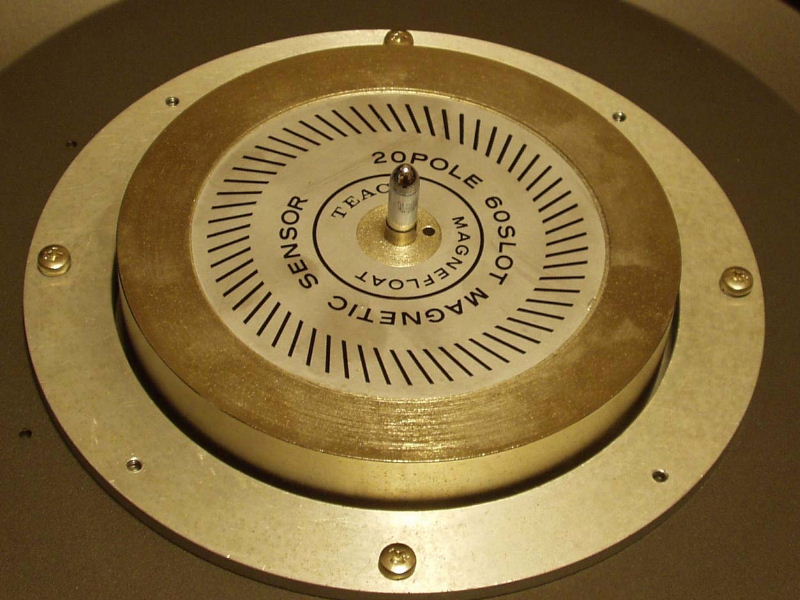
SP-10
|
1970年 6月発売
82,000円
モータ:20極60スロット超低速電子整流子モータ
ターンテーブル:アルミ合金ダイキャスト直径30cm 慣性質量330kg・cm2自重2.8kg |
 |
 |
 |
 |
 |
 |
|
 |
| |
開発者の小幡修一さんが、情報メディア学会誌において、「開発発表時点での発売目標価格は約30万円に設定していましたが、経営幹部の方針で、10万円以下に決定されて、この商品分野の業界トップを目指す強い指示に、研究・開発・製造部門全員の意気が高揚したのを憶えています。」と書かれている。 |
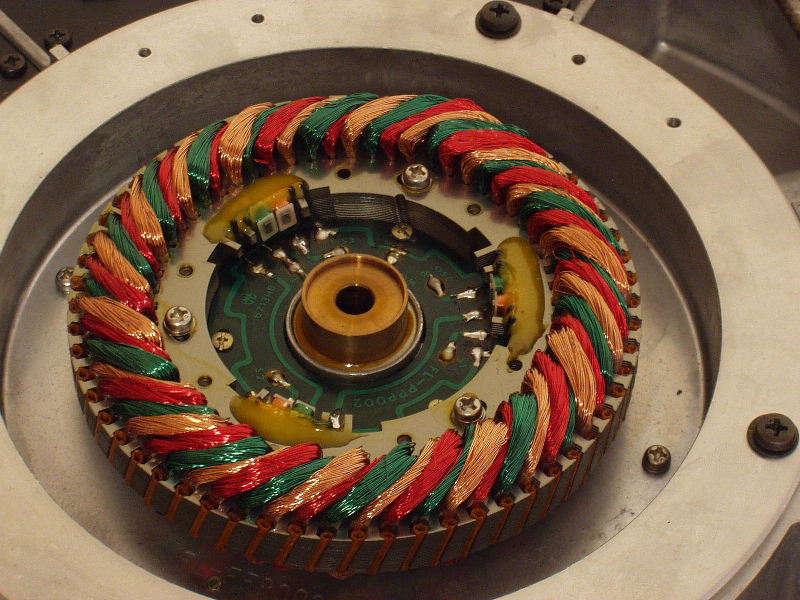
世界初のDDモータである。
30年以上経った現在でもメンテナンス無しに完動品が入手できることは、設計の優秀さを物語っている。この機種の唯一の弱点は、アルミシャーシの腐食かもしれない。
工業デザインとしても、日本には珍しくシンプルでかつ個性的なデザインである。直線と曲線が上手く融合したある意味日本的な美を現したデザイン。 |
工業デザインを担当された陰山忠司さんは、現在茨城県笠間市で陶芸家として活躍されている。オーディオがハイテクであった時代の名品といえると思う。
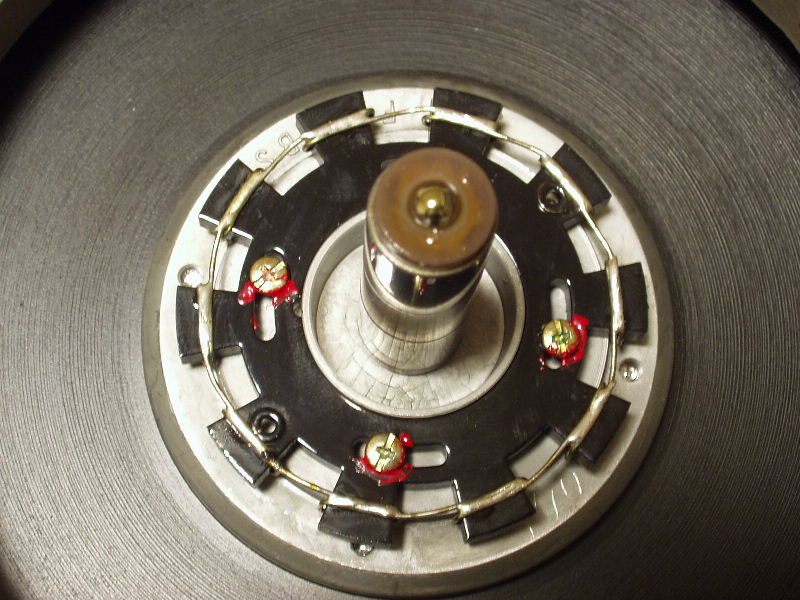
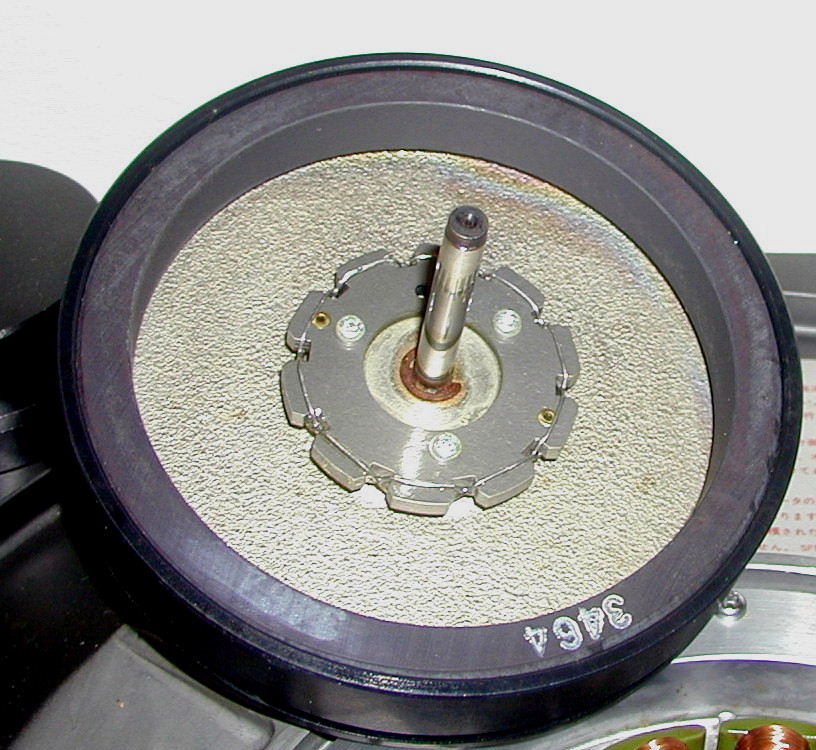
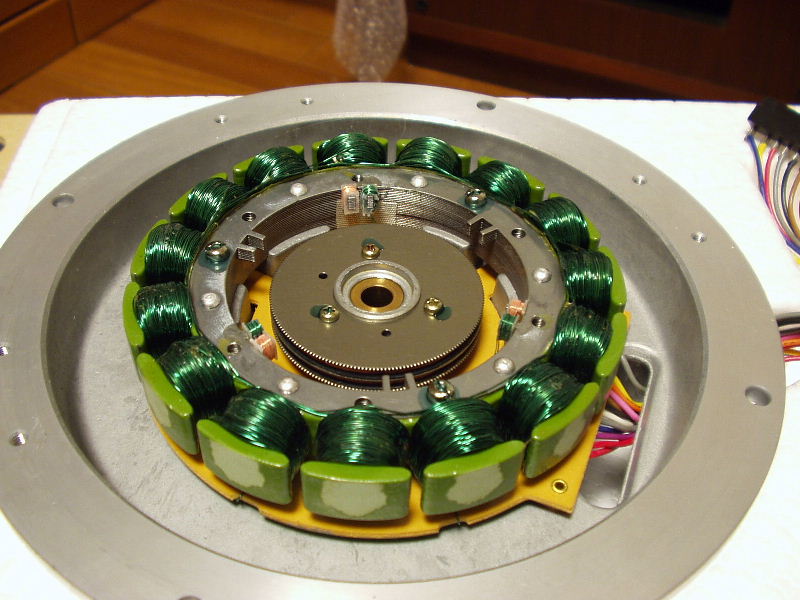
後でOEMされる兄弟機種に比べるとマグネットにインデックスマークがないのが特徴。これは位置検出ロータの位置決めを、現物で測定して決めたので必要なかったのかもしれない。
|
赤のマジックでの書き込みがあるのは、鑑定団員による書き込みではなく、オリジナルのままの状態から存在したものである。
磁石の材質はマンガン・アルミニューム磁石。 |
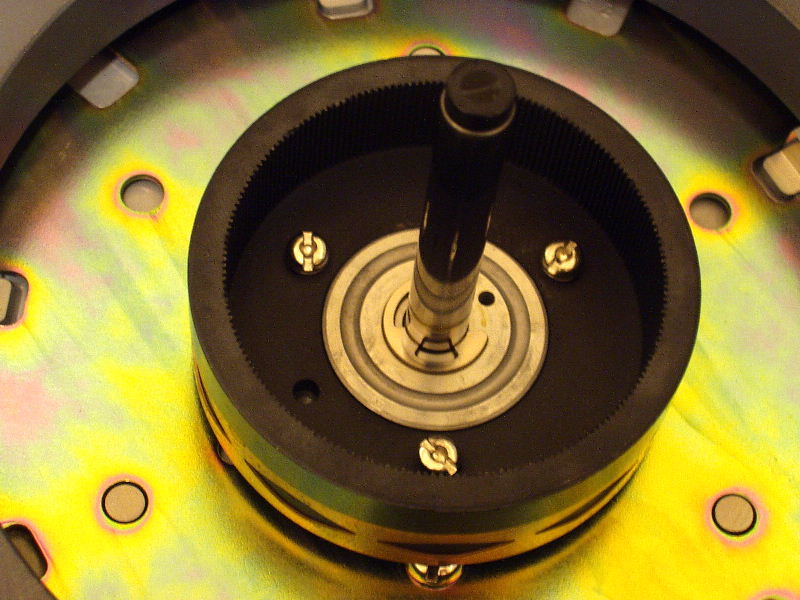
ローター中心に取り付けられたのが位置検出用歯車。ローターが20極=S・Nが10組なのでこちらの歯も10個になるのだが、当然ローター磁石と歯車の歯の位置には動作上関係性がある。
SL-1100以降では歯車取り付け位置は構造的に固定だが、SP-10では最適位置に調整後固定していたのかもしれない。という風景。 |
SP-10のプラッタ-は全面旋盤加工されており、外周は少しだけ低く、緻密な加工がなされている。当然AT-666はぴったり張り付く。 |
裏面。上部やや右寄りに、ダイナミックバランスを取った痕跡のドリル穴。 |
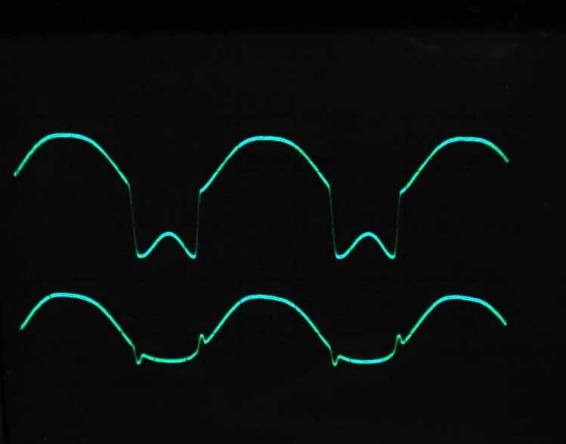
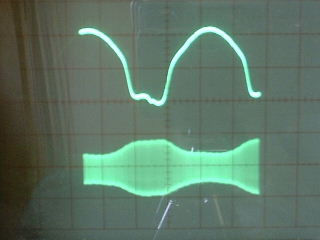
要注意!!
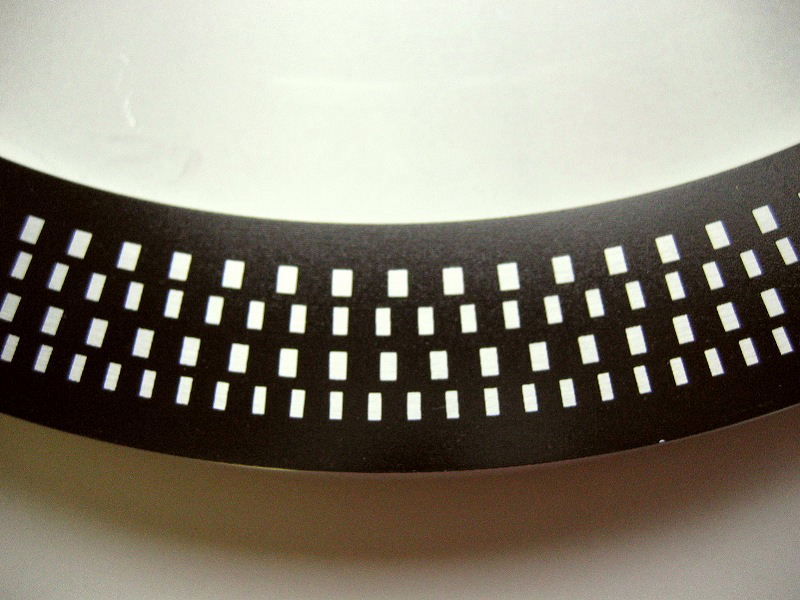
初代SP-10のプラッターには、アルミプレートに印刷されたストロボパターンを有するもの(右上)と、アルミにアルマイト処理でストロボパターンを直接描画したらしいもの(右下)の2種が存在していたことが判明。問題は、後者の場合赤外線フォトインタラプタが使用不能なこと。詳しくはこちら。 |
アルミプレートに印刷されたストロボパターン。 |
 |
| PD121 |
1975年8月発売
135,000円
ターンテーブル:30cmアルミダイキャスト製直径30cm、慣性質量340Kg・cm2自重2.5Kg |
 |
 |
 |
 |
 |
 |
|
 |
| |
|
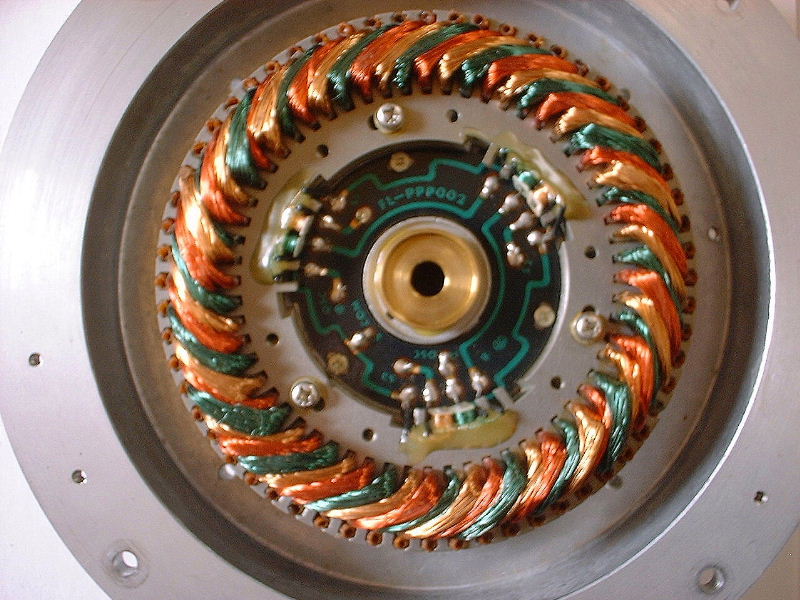
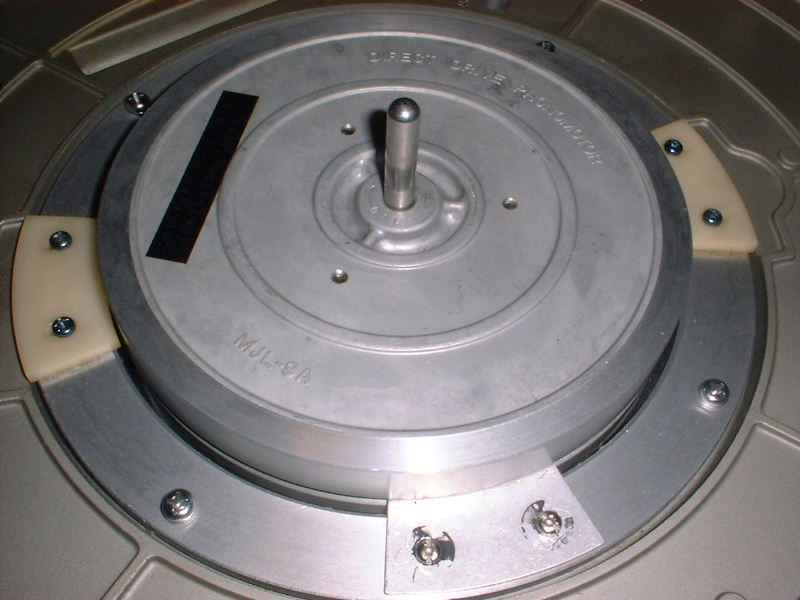
オーディオ各社がSP10に追従するために次々とDDを投入した中で、三洋とティアックとともに遅れて発売されたラックスマンのDDプレーヤ。アームレスで、この時代の流行であるSME3009を実装することを前提としてデザインされていた。アルミダイキャストの堅牢なボディと木製フレームの優雅なデザインを特長とする。
|
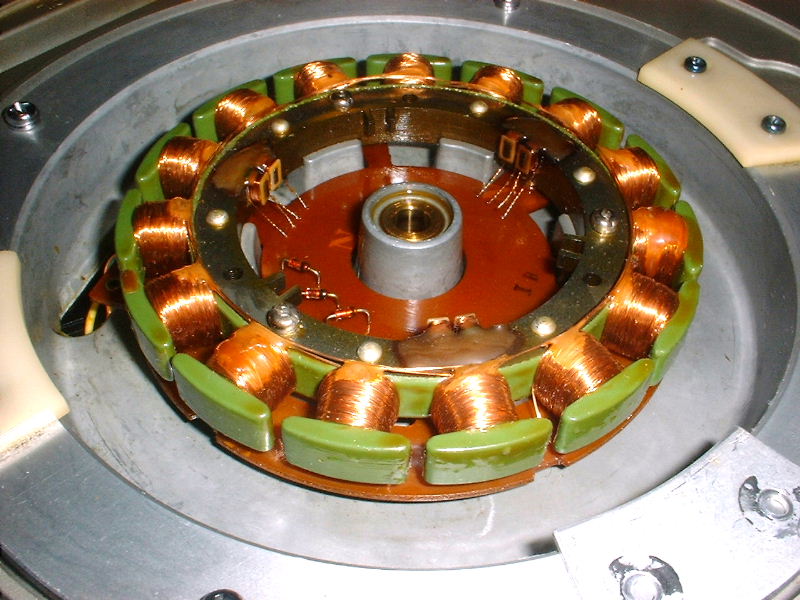
コイルなどの基本構造がSP10と同じであることが分かる。位置検出コイルを接続する中央の丸型の基板が同じ型番であるが判別できる。明確に分かる違いとしては、位置検出コイルの固定の仕方と、コアの色である。60極ともなると位置検出コイルの取り付け精度が問題であることを示しているのかもしれない。固定の仕方による特性的な違いは現在のところ明らかになっていない。今後の鑑定団員の報告を待ちたい。
|
マグネットの材質がマンガン・アルミ磁石から変更になっているように見える。(色が違うだけかもしれないが)ロータの着磁のインデックスマークの白い線がロータマグネット上にある。位置検出のロータコア部の位置決めを行うためのものかもしれない。
|
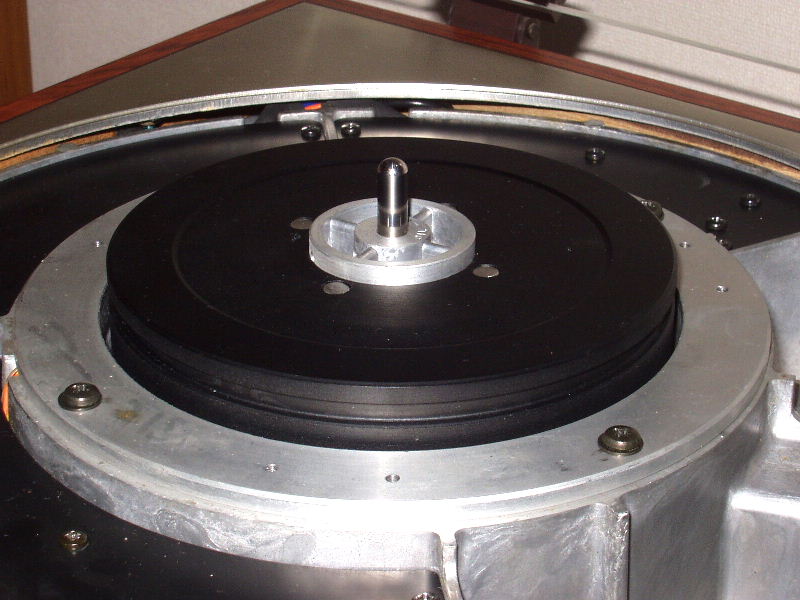
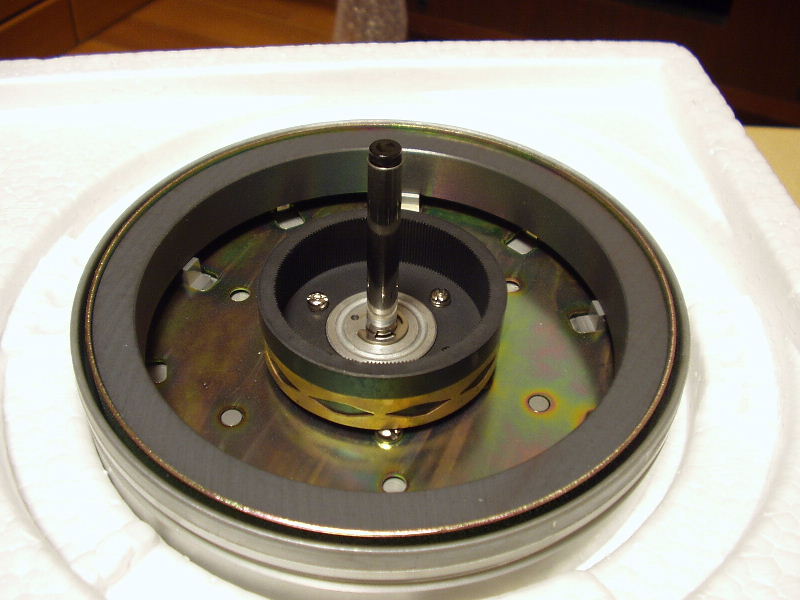
回転軸がSP-10とは微妙に異なり、軸径が6.95mm(SP-10は11.96mm)とやや細いほか、軸受部分も回転軸の先端が局面加工となっている。 |
センター穴はSP-10のそれと異なり、センターシャフトの径で開いている。また縁にはMK2のそれのように3mm位のフランジがある。 |
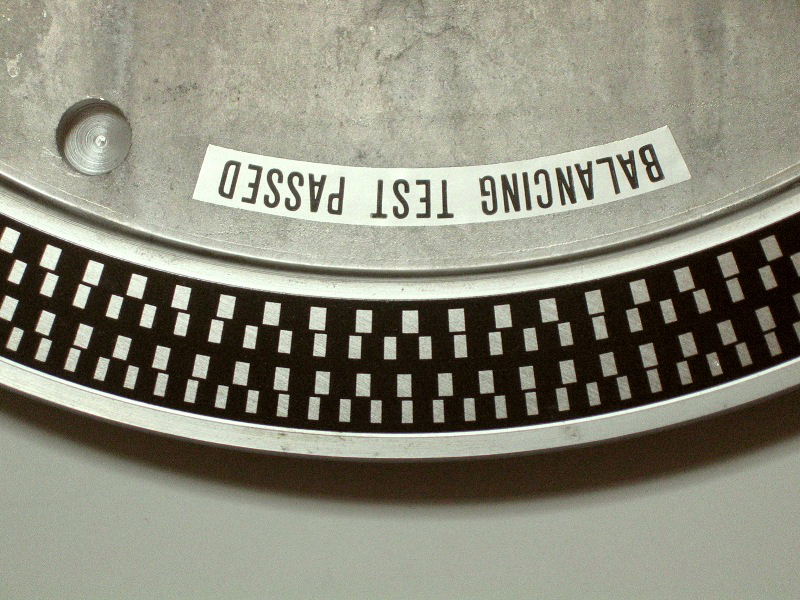
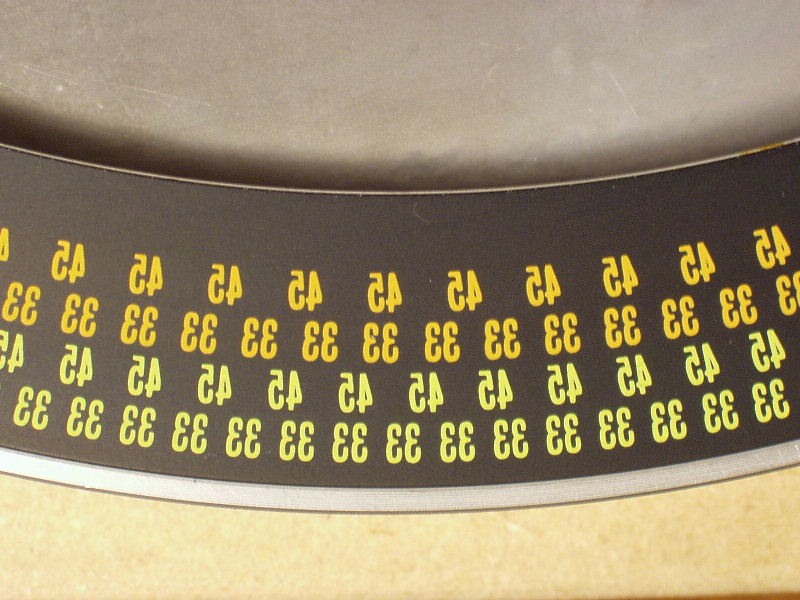
裏側からみると、ストロボパターン以外はYP1000IIと同じようなデザインに見える。バランス・テストをパスしたシールが貼ってあるが、テクニクスの純正品のようにドリル跡が見つからない。ストロボパターンの下にあるのかもしれない。他の兄弟機種にも共通する謎となっている。ストロボパターンは金田式の心臓部なので、非破壊で確認することが難しいため、今後もしばらく謎のままかもしれない。 |
|
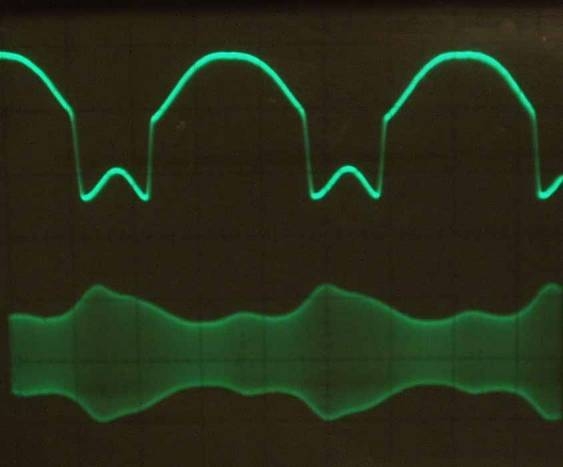
ブラックライトをあてて、文字を浮き上がらせるという変わったデザイン。ブラックライトがパルス駆動となっているため、ストロボの文字が綺麗に浮き上がる。ストロボパターンの位置の精度は高いと思われるが、金田式のFGに利用するには工夫が必要。 |
| YP1000 |
1975年発売 140,000円
モータ:DCサーボモーター(20極60スロットブラッシュレス)
ターンテーブル:31cmアルミ削り出しヘアーラインアルマイト処理(重量2.4kg)
回転数:331/3,45rpm 2スピード
回転数調整範囲:±6%・各回転数独立調整
SN比:60dB以上
ワウフラッター:0.03%以下(WRMS) |
 |
 |
 |
|
|
 |
|
|
| |
|
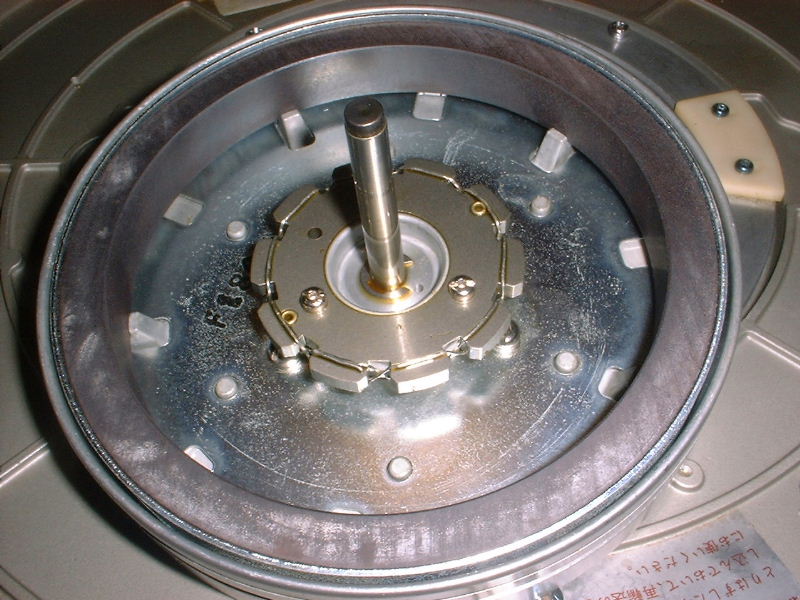
ヤマハのYP1000のモーター。 |
こうして見ると元祖SP-10とPD121及びYP1000は中央の丸型基盤が同じ形番であり、モーターは基本的に同じものであったことが分かる。ただし、SP-10だけはスピンドル軸径がより太かった。 |
さらにロータも見るとPD121とYP100のモーターは全く同じものだったということが分かる。 |
|
|
YP1000のプラッタ-は独自ですねぇ。SP-10属で裏面中央部がフラットなのはこれだけのようで、同社のYP1000Ⅱ用とも違うとは面白い。 |
|
|
| YP1000Ⅱ |
1977年発売150,000円
モータ:20極60スロットDCサーボモーター
ターンテーブル:31cmアルミ削り出し2.8kg
ワウフラッタ(WRMS):0.03%以下
SN比:60dB以上
回転数調整:±6% |
 |
 |
 |
 |
 |
 |
 |
 |
| |
|
こちらはヤマハのYP-1000IIのモーター。 |
|
|
|
SP-10のものより少し径が大きく、重量もあるようだ。YP-1000はプラッター表面に埋められた3本のゴムのリングでレコードを支えるようになっていたが、これはドーナツ状のゴムシートが乗っている。 |
ゴムシートが嵌まる部分が1段低く加工されているため、これもAT-666をそのまま載せるには適さないと思われる。 |
裏面を見ても、ダイナミックバランスを取った形跡はない。 |
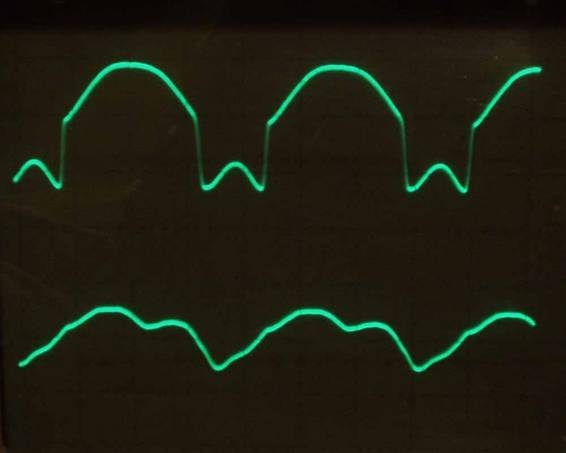
ストロボパターンはSP-10同様の印刷だが、明確で平面性も良好のようだ。ここは金田式制御にも適していそう。 |
| DD10 |
|
 |
|
|
|
 |
 |
|
 |
| |
|
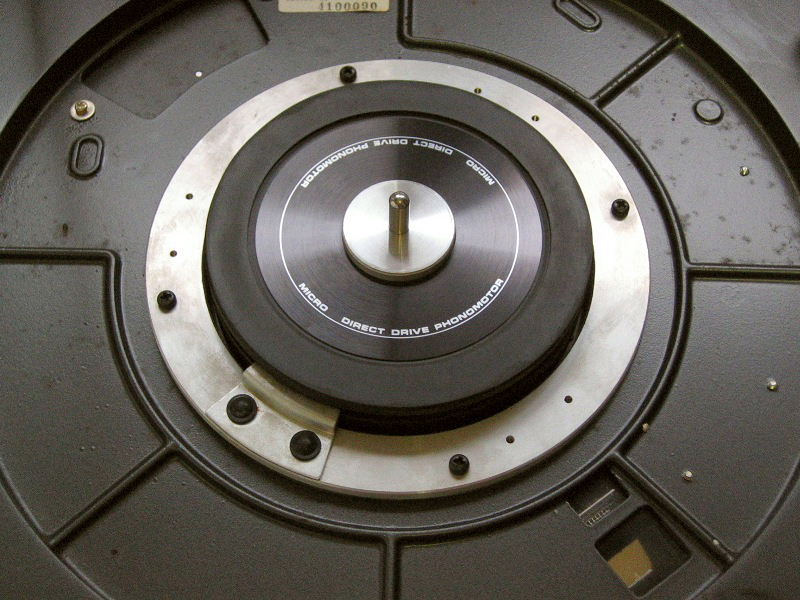
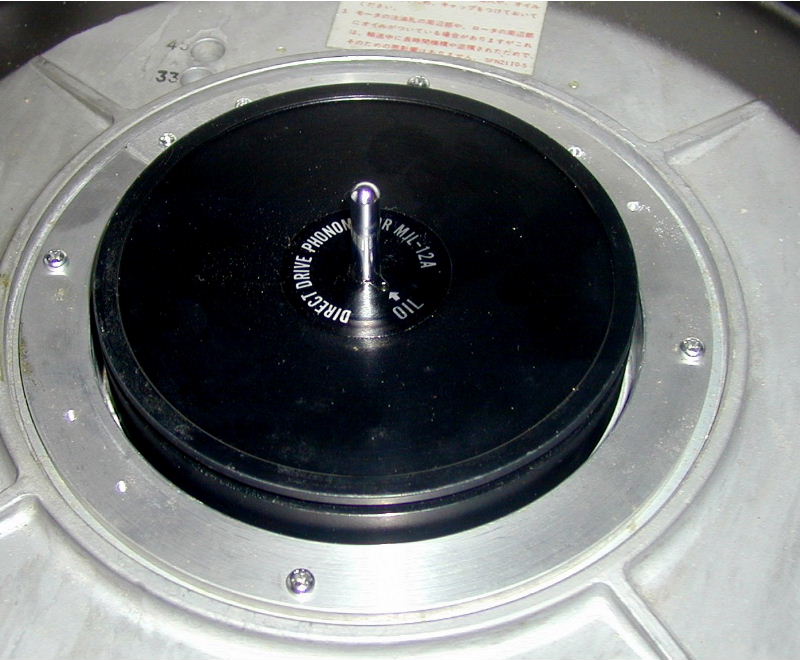
マイクロ精機のダイレクトドライブプレーヤーDD10のモーター。ローター上面には“MICRO”と表示のあるプレートが貼られているが、外観からこのモーターの正体は明らかですね。 |
|
|
|
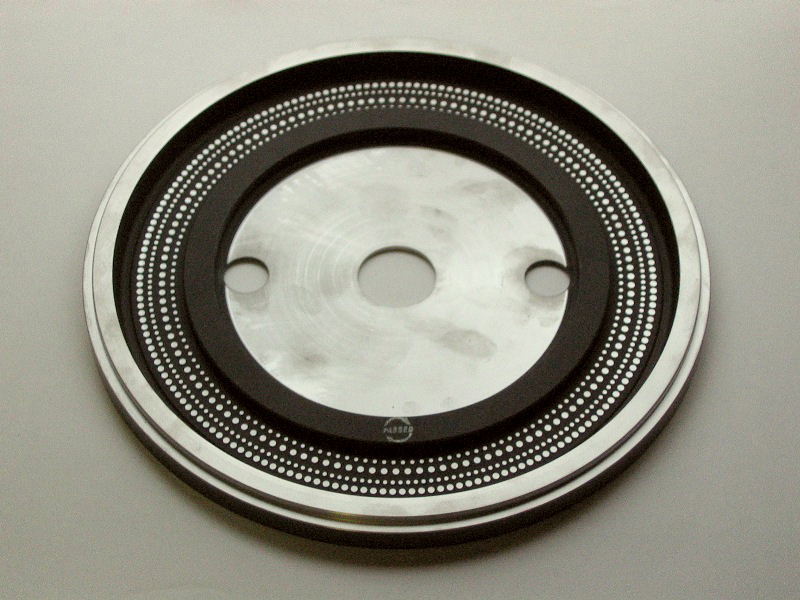
径310mm、2.4kg。外周部分の上面と側面は旋盤で平滑に仕上げられているが、内側の黒く塗装された部分は鋳造した表面そのままのようで、平面精度は期待できない。この部分は外周の旋盤仕上げの部分より僅かに低くなっていることもあり、AT666をそのまま載せても密着してくれないだろう。 |
裏面。ダイナミックバランスを調整した様子は見られない。もともとバランスが取れていたのかもしれないが。 |
|
ストロボパターンはSL1100のように浮き彫りになった表面を切削加工したもの。 |
SL-110
(SL-1100) |
1971年11月発売
72,000円(SL-1100)
モータ:20極15スロット超低速電子整流子モータ
ターンテーブル:アルミ合金ダイキャスト直径35cm
慣性質量320kg・cm2自重2kg
|
 |
 |
 |
|
 |
 |
|
|
| |
|
MJL-12A |
SP-10登場後1年にしてアーマチュアコイルの巻き方はこちらに変更されてしまったことが分かる。以降のテクニクスDDターンテーブルのモーターは全てこの巻き方だから、現在に続くSL-1200シリーズの直系の祖先と言う意味ではこちらか。 |
ローターの磁石の材質はこれ以降フェライト磁石。 |
中央の歯車の歯の形状もSP-10とは微妙に異なる。こちらは歯が台形状だ。
この点はSL-1200用のモーターも同じ。 |
SFTE110 |
|
|
|
SL-1200
(SL-120)
(SP-12) |
1972年11月発売
65,800円(SL-1200)
56,800円(SL-120)
モータ:20極15スロット超低速電子整流子モータ
ターンテーブル:アルミ合金ダイキャスト 直径33cm慣性質量310kg・cm2 自重1.75kg |
 |
 |
 |
|
 |
 |
|
 |
| |
|
MJL-9A |
次に登場したのが今に続くSL-1200の初代。この初代用モーターはSL-1100用から化粧を落としただけで構造は全く同じもののよう。 |
残念だがSL-1200もMK2以降はクォーツロック化されたものの、極数スロット数が削られ(16極12スロット?)モーター自体の価値は低下した。 |
|
SFTE120 |
|
|
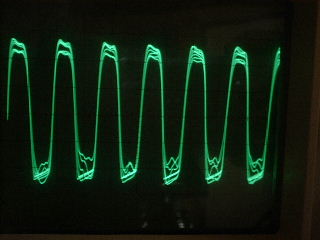
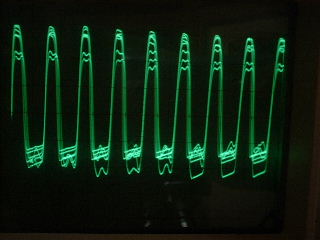
突起数上から133個/周
180個/周
160個/周
216個/周
と、SL-1100と同じ。というか、商用電源周波数によるストロボだから皆同じというとか。 |
| SP-10MK2 |
1975年 6月発売
150,000円
モータ:クォーツロック20極15スロット超低速電子整流子モータ
ターンテーブル:アルミダイキャスト直径32cm慣性質量380kg・cm2自重3.0kg |
 |
 |
 |
 |
 |
 |
 |
 |
| |
|
MJX-12A
SP-10の名前を継いだもののモーター自体は初代SL-1200用とほぼ同等だ。クォーツロックの制御アンプが非常に複雑かつ巨大で、コストの殆どがそちらに回ったためだろうか。残念。 |
このモーターになって初めて周波数発電機(FG)が登場した。軸中央部にあるのがそれだ。勿論クォーツロック対応のため。ただのプラッタ-のように見えるが実は190個/周の歯を持つ歯車になっている。 |
ローターの方も中心が10の歯を持つ歯車から、内周に190本の溝を彫り、外周に10個のひし形状切抜きを有する銅版帯が巻かれた磁性体に変更されている。勿論FGによるクォーツロック対応のためだが、上手く考えたものだ。 |
FG用に内周には溝が彫られてているのだが、どうやって彫るのか、手間そうだ。
外周に巻かれたのが歯車の歯の代わりをなす菱形状の切り抜きがなされた銅帯だが、切り抜きは菱形と言うよりは台形状といった方が正しい。 |
SFTE102-01
SFTG102M03(ラバー) |
|
ラバーを剥がした姿。
確かにSP10用には劣るが、といって、SL1100用&SL1200用に劣るとは思えないのだが(^^; |
190個/周とFGに同じ。よってこのパターンをフォトインタラプタで検出してボルテージコンパレータに入れれば他に制御部の変更を要せず動作するはず。
ところで、ワンパターンで33&1/3rpmにも45rpmにも78rpmにも対応するのは、クオーツロック化とともにストロボ発光がクオーツロック発信信号を活用した周波数切り替え方式になったため。 |
| |
|
|
|
|
|
|
|
|
|
| TN-400 |
1973年月発売
55,800円
モータ:20極60スロット超低速DCサーボモータ
ターンテーブル:アルミダイキャスト直径30cm
慣性質量335kg・cm2自重2.4kg |
 |
 |
 |
 |
 |
 |
|
 |
| |
|
20pole 60slotのシールが張ってあり、モータの構造をあらわしている。
本体のサイズとロータのサイズは、ほぼ同じであるが、抜け止め用の金具が、前面にないのも大きな違い。
SP10系の特徴である上面中央部のダイキャストの金具が見えない。
|
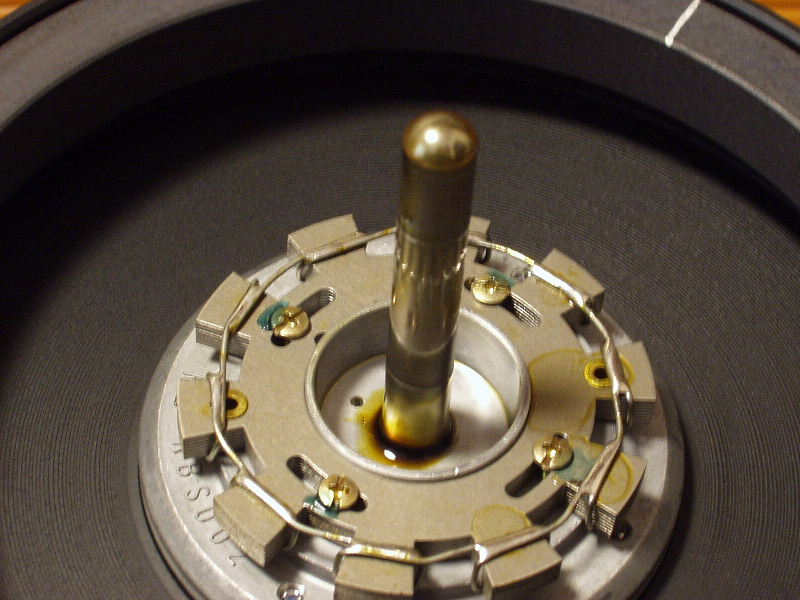
果たしてステータコイルは、同じ色分けになっている。ステータ巻き線と回転検出巻き線の引き出し方法は中央のドーナツ状の基板を介して引き出される。
SP10系の特徴の位置検出コイルの構造が大きく違うのに着目して欲しい。フェライトコアのコイルが3個、120度ずつ離して配置されている。SP10では励磁コイルと検出コイルの2つのコイルで検出していたが、このモータでは、1つのコイルのインダクタンスの変化で位置を検出する。このため金田式への転用は難しいが、軸受け構造や巻き線構造は丁寧に作られているので、ホール素子を使った実験などに適しているかもしれない。
ステータのコイルのコアが緑色の塗料で塗装されているが、これはMKIIなどと同じでコイル巻き線の保護が目的か?
軸受けの外側の黒いドーナツ状のものは、磁気反発用のマグネットである。 |
フェライトマグネットが、同心円状に3つ配置されている。一番外側がモータの駆動用のロータマグネット。2番目が位置検出用のマグネット。中央のマグネットがベルトドライブの時代からTEACの得意技であった磁石の反発を使った軸受け加重低減用マグネットである。
ロータもダイナミックバランスを取った痕跡があり、DDでは後発メーカであったTEACの心意気が伝わってくるようだ。
|
軸の先端には、金属製のボールが埋め込まれていてSP10に似ている。
軸の太さは、10mmでSP10ともYP1000系とも違う。
|
アルミダイキャスト製であるが、DENONのDP3000系のような構造となっている。AT666をそのまま載せるのは難しいだろう。
|
|
|
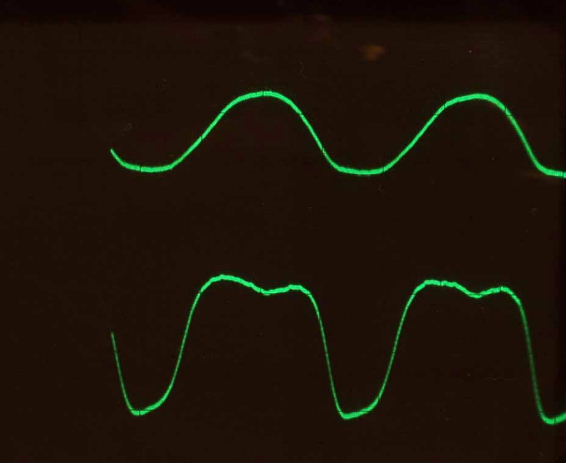
ダイキャストで作られた突起がある。ちょうどSL-1200を伏せたような構造になっている。ストロボ面が斜めになっているため、フォトインタラプタの取り付けの難易度は高い。
|
 フォトインタラプタ自体旬を過ぎた素子なのか、代わりになるちょうど良さ気なフォトインタラプタがなかなか見つからなかったのだが、あった。(^^)
フォトインタラプタ自体旬を過ぎた素子なのか、代わりになるちょうど良さ気なフォトインタラプタがなかなか見つからなかったのだが、あった。(^^)